| Home > Robots > Alexander > August | |
| August | |
![[August]](or-aug.gif)
In early August I started having noise problems with the integration of the PlayStation hand controller and the R/C transmitter. I tried a couple of sneaky methods to get the data reliably to the onboard controller, but nothing worked successfully. So I had to switch to Plan B and spend another $600 on a second R/C rig plus a ton of Tekin Rebel speed contollers and give the Edger it's very own control transmitter. This had the unfortunate side effect of throwing weapon officer Dave off in the control scheme, as he'd been practicing for two months with the PlayStation. And it showed at the event.
Around the same time, I weighed the Ax and learned that it was 3.5 lb. overweight. After recovering from the shock and two near-allnighters of machining I managed to ditch the weight and bring it back under control. This ate up my "slack week" causing me to once again return to Robot Wars tired, stressed and with a non-empty ToDo list.
 |
About the only structural modification I made to the Ax in August was to replace the Aluminum baseplate of the Edger with a 4mm thick chunk of carbon composite. This stuff is a trip, posessing the equivalent strength of Al at half the weight. Downside is that it can't hold threads and is a major pain to drill and cut. A 24" by 18" sheet costs about $120 from Kinetic Compostites. Upside is that it has the cool Stealth Fighter persona about it. |
 |
We sold out of event T-shirts this year, but I've ordered another two dozen. They are black, 100% cotton (Hanes beefy-T) available only in size XL. Send me e-mail if you didn't get one there and/or want one now. The price is $12 for the shirt plus $3 for shipping, handling and dealer installed optional equipment. |
 |
We took some damage at the event to the tune of about $500. There was some talk of inviting the Alexander to Great Britian in November to participate in the big Robot Wars UK competition. Whether I fix the Ax or not depends on whether this opportunity materializes or not. I'm going to wait and see. |
| How did we do in the arena? Terribly. The Sullivan drive motors overheated and burned up; it was a mistake to switch from torque to speed this year. The main acutuator for the Edger broke every time; turns out those units are great at extending but come apart when pulling under load. So much for my "know every part of your robot" philosophy. The video link worked great though! Well, that's pretty much it for the Alexander project. With a complete rework of the drive base this robot could still do pretty well in the middleweights. Maybe a future project! |
 |
In short: the Brick was a wooden box with the Agamemnon's drive system installed. It was one step below cheesy. Here we are machining the openings for the wheels. Why we didn't just use a jig saw and be done with it is still beyond me. | |
 |
Mike inspects the hole I just bored. Casters on both faces and large drive wheels in the back allowed for inverted operation. | |
 |
OK, this is more like it: precision jig sawing on a precision block of wood. | |
 |
Here Mike and Dave are setting it down on the floor to see how flat it sits. We had no idea how it would end up since it was built in two days with zero engineering. | |
 |
Dave tweaks the gear alignment on the driveline. Adjustable hose clamps were used to control the tooth face pressure. At least that's how I saw it; Mike and Dave just played with it until it "sounded good." | 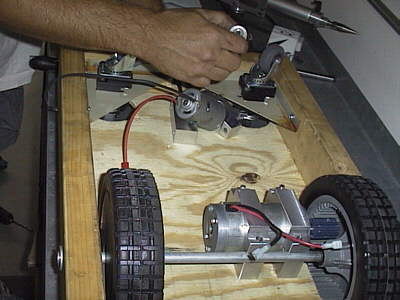 |
 |
The wheels were off a self-propelled lawnmower. Because it was a Saturday when we bought them, we were unable to get the metal cogs that drive the internal ring gear. So we improvised. It turned out that a clutch alignment tool for a late model BMW had the proper tooth pitch, so we bought a couple and mounted them on some steel bushings I turned. Viola! The Brick does 25 MPH. | |
 |
The finished Brick. Note the true-to-life color. We didn't have the extra weight to glue actual brick on the outside like we wanted. At the event, Mike and Dave bolted on various chunks of steel for use as ramming spikes. One almost made it through the carbon laminate side panel of the Defiant. The brick lost to said Defiant in the final face-off battle, and a motor wire connection popped loose during the melee, so no trophies this year. But Mike and Dave had a great time competing so the purpose of the project was accomplished. | |