| Home > Robots > Agrippa > November 1997 | |
| November | |
![[November]](lnov.gif)
|
Introduction Here it is: year three of robot building. My decision to enter the heavyweight class this year with the Agrippa was motivated largely by internal factors. I've really loved the middleweights, but I want to work with big power transmission and, well, big power. Carrying 60 lb. of batteries alone was unthinkable in the middleweights, but in the heavies it's a bit on the light side. Groovy. And although one other team member chided me "Come up and play with the big guys," that isn't a reason I've jumped up a category. There is so much fame and glory to be had at the top of the food chain - I just can't pass it up another year.  Actually there is a pre-story behind this. After the judges creamed me in RW'97, I decided to do what Mark Setrakian is great at and just operate outside the expected norm. So I came up with this design for finishing the 8-legged walker Hannibal-8 and mounting a 4-joint neck supporting a head with biting fangs on the end. The neck mechanism would be a smaller version of Mark's Snake body, able to arch and twist. The attack mode would be to bite the opponent to death. Yeah, I know what you're thinking; "Hey, it'll at least look cool" was my practiced reply. I spent about 3 weeks working the dimensions and mechanics; the 170 lb. weight limit as applied to a middleweight walker made it entirely possible. And it would only cost about $2K.
Actually there is a pre-story behind this. After the judges creamed me in RW'97, I decided to do what Mark Setrakian is great at and just operate outside the expected norm. So I came up with this design for finishing the 8-legged walker Hannibal-8 and mounting a 4-joint neck supporting a head with biting fangs on the end. The neck mechanism would be a smaller version of Mark's Snake body, able to arch and twist. The attack mode would be to bite the opponent to death. Yeah, I know what you're thinking; "Hey, it'll at least look cool" was my practiced reply. I spent about 3 weeks working the dimensions and mechanics; the 170 lb. weight limit as applied to a middleweight walker made it entirely possible. And it would only cost about $2K.But then, things changed. In the month that followed RW'97 I switched jobs, leaving my four-year employer Canon for the new opportunities at a large entertainment company. My commute jumped from a leisurely 20 minutes each way to over 90. Net effect: available shop time cut from five hours/night down to three.  So there I was, on the edge of starting a really cool design and then faced with the possibility of not being able to finish it.
So there I was, on the edge of starting a really cool design and then faced with the possibility of not being able to finish it.So I switched gears. Off to the left is the vehicle my heavyweight will mimic, a Caterpillar loader. Simple, lots of steel and a few interesting challenges, like how to deliver four wheel drive on a vehicle that literally bends in half to steer. It is truly a WYSIWYG design. So sit back and enjoy the project as it unfolds. Just like I do. And hey, if there is a way you could patronize any of my sponsors, I'd be much obliged. |
 |
Here is the plan view of my heavyweight robot. Some elements will change as it grows to final size but this is the general idea. Low, strong and irresistable. 4WD, differential steering, actuated bucket, backup alarm, Recaro seats and optional bumper-to-bumper warranty. Well, I'll get most of that done anyway. |
 |
For this robot, large high-traction wheels are required. On a hunch I checked out the stacks-o-stuff at the local Harbor Freight Tool store. In the "all things wheels" aisle I marveled at the sight: piles and piles of wheelbarrow and wagon wheels! After carefully weighing and bouncing various candidates, these suckers got the green light. The wheel is 13" in diameter, semi-pneumatic and has a steel hub. The wall thickness on the hub was what sold me - plenty of meat to weld to after the cheezy 2 cent bearings were knocked out. Just to be safe I bought six - you never know how long things persist at Harbor Freight. |
 |
I turned a dozen steel bushings to couple the drive shaft to the wheel hub, each custom fit for optimal concentricity. After lining them up on both ends (see how below) I dropped a bead of weld in the V slot between the hub and the bushing. |
 |
The completed wheel, ready to be coupled to the drive shaft. You know, this "differential" steering on the Agrippa is a bit strange. The machine actually has a pivot point in the middle and uses actuators to push and pull the front/back segments into position for the turn. Lab Note Since the robot is 4WD, and there is only one motor, a driveshaft transmits power between the segments. How does it get through the pivot? A U-joint. |
 |
This is the axle alignment jig I built to make sure the bushings stayed parallel as I welded them into place. It also made sure the keyways were aligned to properly mate with the future drive axle, a 5/8" dia. chunk of drill rod. |
 |
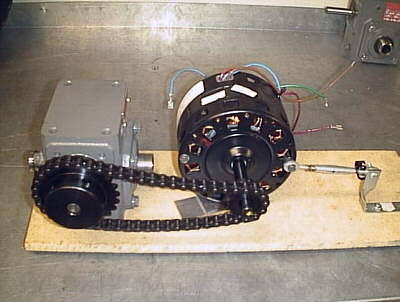
Here is where it all happens, the output shaft of the motor that will drive the Agrippa. It is a 3/4 HP continuous duty DC motor, designed to run floor sweeping brushes at 36v all day long. In its new life in the service of Team Delta, it will run at 60 or 72v until it melts, or until the 5 minute battle is up. Don't ask where I bought it, becuase it was a gift from '97 team member Dave Johnson. Very cool. |
 |
Here is a quick comparison: on the top, the Agrippa drive motor. On the bottom, the original Agamemnon drive motor (that when geared down could tow my Isuzu Rodeo car.) Though capable of generating the same final axle torque, the bigger one can accomplish it at higher RPM. Therefore it generates more power. |
 |
As with most of my designs the final stage to the axle is a worm gear speed reducer. Two of them go in the robot, one in each half. They are one size larger than I've ever used, chosen for the 2HP of power I'm going to jam through them at low RPMs. One interesting characteristic that you may have not seen before is they are hollow output shaft models - perfect for running a drive axle right through and hanging a wheel on each end. Lab Note |
 |
Out of the box, I could barely turn the input shaft of the speed reducer by hand. Solution? Rig up a motor to break it in. About 30 minutes after I turned it on, I smelled something absolutely horrible - the AC capacitor on the motor had overheated and the dielectric was boiling out. Plan B worked fine: chucked into the jaws of the lathe the gearbox was noticibly easier after ten hours of running. I also cut the spring on the input shaft. I even plan on using small strip heaters to preheat the gearbox prior to the battle, getting the oil viscosity dropped down to where I need it. |
 |
Treat #1: My job at Imagineering has put me in contact with some fantastic people in all disciplines of engineering; my cube is next to the ride mechanical team. Once when I happened to mention welding, Tim dragged this chunk of metal out to show me a real weld. It matches the original material so well that I've outlined it in blue so that you can see it. Tim explains it as so: It is a weld quality sample, 2.25" chrome-one-moly steel, part of a steam generator for a breeder reactor. The part was 4 feet in diameter and took 29 days to robotically MiG weld with .030" wire, running 24 hours/day. |
 |
Treat #2: As long as the people at Tesmec keep making machines like this (it weighs 80,000 lb.) I'll continue to believe in the human spirit. (Many thanks to my pal Adam Clark for introducing me to the world of rocksaws.) |
{kind=link}
{kind=link}