| Home > Robots > Agamemnon > January 1996 | |
| January 1996 | |
|
Introduction Every month since January I've been trying to generate a "status report" or multimedia update that shows what I've been doing on the Ag. Photography is not my specialty; optimizing data transfer in microcode is. So don't expect too much from these pages. When possible, I've tried to have friends that are more photonically adept than I snap the pix. There are two months that have no report becuase I took a sabbatical from the project. I avoided the shop, thinking about the Ag, computing torque ratios and balancing overhung loads. I played Cyberia2 on my PC. Some of you have expressed concern over the detailed pictures I've posted here. "Aren't you afraid people will exploit your weaknesses?" "Aren't you giving away valuable design secrets?" "Can I borrow that thing to chase my neighbor's cat?" To those of you who have expressed worry: thanks, but remain calm. I have a few things going in my favor:
|
The drive system is done and it performs better than I expected. The Colson wheels I picked are perfect for finished cement and smooth asphalt surfaces. At about half of its target weight, the 45 lb. vehicle-of-doom cannot be stalled. I'm guessing that my center of mass is about 3/4" above the ground. The modified Tekin speed controllers work nicely. I'm still using the standard Futaba FM transmitter, but the mods to it are not important as of yet.
The design goal was 6 ft/s maximum speed, and because I used motors lacking manufacturer's spec data I wasn't sure what the final output torque would be. Well, it's enormous. If I can't saw/slice/spear/etc. an opponent into submission then I can at least ram them really hard.
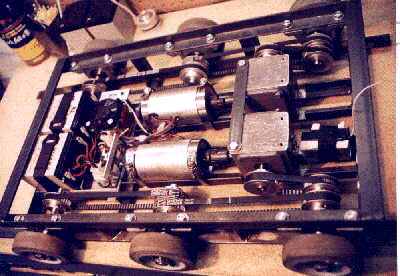 | Overhead view showing the symmetrical driveline and electronics bay. |
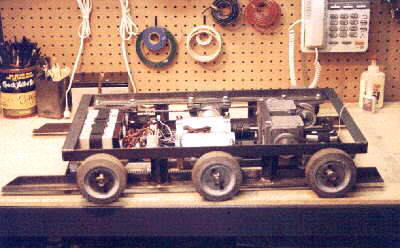 | Side view, sitting on the electronics workbench. |
 | Three-quarter view showing the incomplete frame from the sloping front. |
 | The obligatory Batman shot. |
 | Torque on the driveline bolts is about 90 ft-lbs. |
 | Safety interlocks keep it from becoming a voltage-to-smoke converter. |