| Home > Robots > Alexander > April | |
| April | |
![[April]](or-apr.gif)
Two new sponsors signed: Nuts & Volts magazine and Sony Computer Entertainment America. Hot. See below for more details. Sadly, Virtual iO closed its doors forever. A great company with a great product that I was pleased to represent.
Thanks to everyone who sent in name ideas for the cutting saw. Daniel Rutter of Australia, had the winning entry: "The Lawn Edger of G'Quon" which the team voted to shorten to "The Edger." (FYI: G'Quon was a backplot character from the Babylon 5 television series.)
And lastly, the Impact Media guys (Trey & Greg, La Machine) received taunt-mail from Rolls Royce, to the effect of "We're going to kick your butt this year." Is it to be believed? They'll have to prove it come August; anyone can send e-mail that says anything.
 |
This picture should have been in last months report. It shows me machining the 1/8" wide groove through a wheel hub. The groove accepts a flat stock "key" that ties the drive axle to the wheel. The black center is a Nylon bushing I turned. |
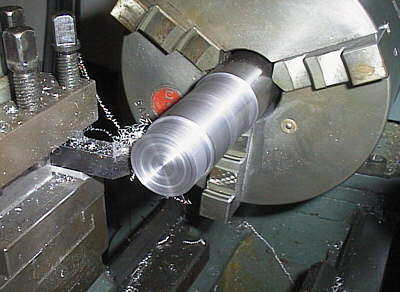 |
This month you get to see how I built the "turntable" assembly; that part that secures the Edger to the frame of the Alexander. It had to be strong, due to the torques generated by force on the end of the arm, plus it had to be powered, able to swing the arm through nearly 360 degrees of rotation. Here is the start of the shaft core of the "turntable." Turned from a hunk of 1018 steel it's plenty strong, where I believe aluminum would fail. I'm a real 7075 alloy fan, but I really want to make sure I don't leave the Edger on the ground in a sudden collision. |
 |
Toward the bottom is the completed disc, turned down from a 5" dia. slice of the same grade of steel. The shaft slides into the disc where it is welded into place. Toward the top is the hubless sprocket I bored out to slide over the shaft, then fastened to the raised area of the disc. |
 |
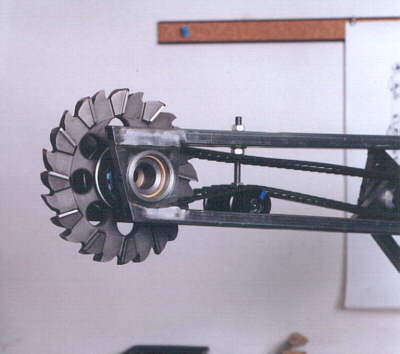
We have assembly! The sprocket is driven through #25 roller chain, by a Pittman gearmotor sitting off to the side. Massive torque and holding ability. In case you can't picture how this works, it's upside down in this shot. |
 |
Here I'm mounting the Edger base plate (blue) to the turntable. The diameter of the steel turntable face was no accident; I wanted maximum support for the aluminum base. The four tapped holes closest to the shaft mount the drive sprocket. The outer pilot holes are drilled through setting the alignment, then expanded and tapped. Four 1/4-20 cap screws hold the two parts together. Which brings me to a good point: on the Ag, I used about five 1/4-20 fasteners. On the Ax I've used over 28 (so far). Believe me, this year's machine will rock. |
 |
Here I'm using a roughing end mill to fab the retaining ring that mounts the drive motor for the turntable assembly. These end mills are insane, practically dragging themselves through the material. After roughting it out I use a boring bar to make the proper diameter hole. |
 |
Here's a closeup of the taper bearing and how it fits into the mounting block. These are off the shelf NTK bearings, pretty much like the wheel bearings in your car. Same arrangement, too, using two of them opposing each other to "float" the load and provide a bearing surface against thrust and rotational forces. How hard was it to bore two depressions on opposite sides of a block, maintaining their axial alignment and diameter to within a few thousandths? Well, lets just say I spent more time building the jig than the part. |
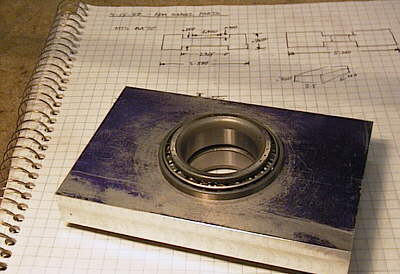 |
Here is the support block with the taper bearings inserted. Machined from a chunk of 7075 aluminum alloy, it is designed to support the complete overhung weight of the Edger. My tests indicate that I can lift the 50+ lb. base of the Ax by the arm, essentially dangling it by these bearings in the block. Cool, eh? (And yes, those are my amazingly complete construction drawings in the background.) |
 |
The (upside down) turntable assembly. The only thing missing is the 1.25" dia. clamp collar that fits over the end of the shaft, preloading and retaining the taper bearings. The Pittman motor on the right was reassembed from a pile of them I bought as surplus. Cleverly rearranging the steel gears in the housing gave me a 60 RPM rotational speed, further reduced to 15 RPM by the sprocket drive system. The motor has an off-center output shaft; rotating the housing within the clamp allows me to vary the sprocket spacing and control the preload tension on the drive chain. |
 |
Another view for your enjoyment. |
 | Ah, the finished products, complete with lightening holes. (The large versions both make great Windows wallpaper, BTW.) |  |
 |
I believe winning at Robot Wars depends on one thing: reliability. Everyone I competed against suffered a component failure, either mechanical or electrical. (Don't make me type up the list.) This quality only comes from knowing your components intimately. So here I've disassembled one of the speed reducers to check out the design. In the process, I was able to clean up the aluminum casting internally. Lots of flashing waiting to flake off and get into bearings and the gear interface. I also drained all the heavy gear oil, opting instead for light sewing machine oil, saving over 60 watts of power. That's a lot. |
 |
One of the best power connectors I've ever seen. Designed by Bob Boucher, founder of AstroFlight in Marina Del Rey, CA, these bad boys can hand 30A continuously and 250 surge without problem. Check out those radial pins: they're actually springs that grip the male component when engaged. And completely gold plated all around. I make it a point to promote excellent engineering when I see it. |
 |
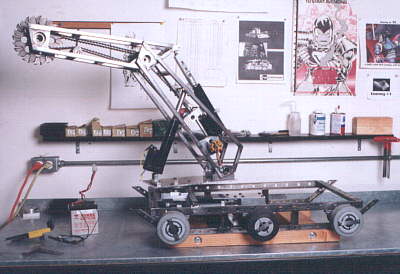
Ah, the joyous designer with his creation. This should give you a sense of scale. Pretty big for a middleweight entry, eh? That's the idea. Also, I'm showing off the Sony PlayStation hand controller that will operate the 5 channels of arm motion. When I contacted the PlayStation division asking for interface schematics and timings, they were more than helpful when I explained about Robot Wars and my intentions. Two weeks later, I was holding the documents in my hand. Stellar! In my arrangement with Sony, I agreed not to divulge any of this information, so please don't ask for a copy. But in the near future I will be able to show how the arm functions are mapped to the various buttons. URNOTE |