| Home > Robots > Agrippa > April | |
| April | |
![[April]](lapr.gif)
 |
Battery box bottom. Say that fast. Here I'm slicing it out of some 4mm thick carbon fiber laminate. Although I have lots of weight budget on the Agrippa I don't really see a need to unnecessarily spend it. I've already roughed the part out with the Sawzall and now I'm truing the edges with an abrasive cut-off blade. |  |
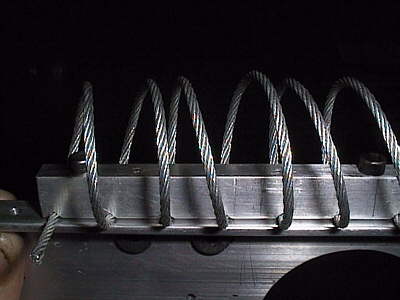 |
A few weeks ago my boss and I were walking though a surplus yard during our lunch break. Nestled among the core memory boards and old sonar control panels were these cool shock mounts made from coiled aircraft cable. "We used these all the time in aerospace" he volunteered, pointing out a pile of commercial ones. So I thought "Hey, I have those parts at home." So here I am building the shock mount system for the power speed controller. When you play with the heavyweights like La Machine and Blendo, rigid mounting is a liability. |
 |
 |
The completed assembly on the left prior to attachment of the 4QD controller board. And on the right you can see it mounted to the frame. And no that isn't a burn mark on the 4QD board, it's just a funny refraction of my flash through the polycarbonate shield. |  |
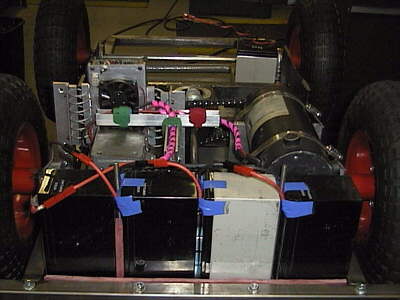 |
The pink stuff is wire wrap keeping the power and motor wires tidy while in the routing trays. The four batteries are visible at rear sitting on that carbon composite plate. If you look carefully you'll make out two threaded rods protruding between batteries 1-2 and 3-4 - a nut snugs a special washer against the tops of the batteries, anchoring them to the composite base plate. | 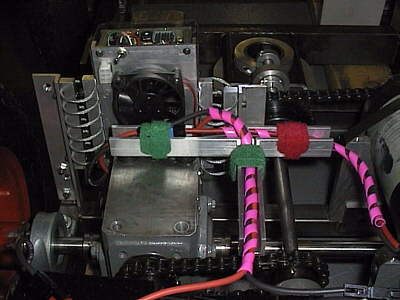 |
 |
In the UK, Richard Torrens designs and builds high efficiency power controllers for his company 4QD. One problem though: the 4QD controllers lacked an interface to a standard R/C set. So here, I've taken care of that. Part of the ton of work I was up to last month was designing this interface circuit to couple a 4QD speed controller to a standard RC receiver. There is some really clever firmware in that PIC controller along with the standard safety features required by Robot Wars rules. |
|
 |
A significant part of this exercise was obtaining a small run of PC boards for this project. So I gave the ExpressPCB company a shot after learning of their service on the comp.robotics.misc newsgroup. Hey this is cool: you download a free program, do the circuit layout on your PC and then submit it right for manufacturing online. The boards showed up two days later, and were tops. | |
 |
Here I'm packaging up the interface board that will run the main motor on the Agrippa. After stuffing it into this slimline box, I'll wrap it in a mouse pad and then zip-tie it to some part of the frame. | 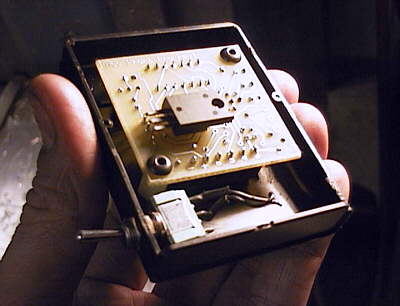 |
 |
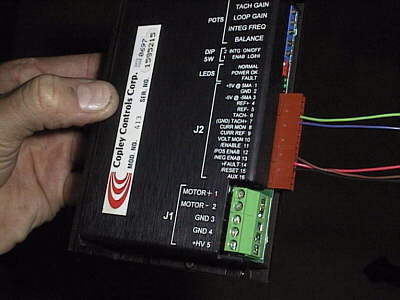
In my quest for cheap, I'm using a 250 lb. Warner Electric actuator that '97 teammate Dave donated to provide steering. Now here is a steal: this is a $400 servo amp I picked up for $100 on the robotics newsgroup. It accepts reference and feedback voltages, amplifying the difference between the two to PWM drive the motor. I know this sounds a bit vague if you're not familiar with closed loop servo systems but I'll fully explain it next month when I get it all installed. |
 |
 |
Not wanting to make the same mistakes again this year, I'm using high current connectors everywhere, fastened by mechanical crimping. These are 45 amp Anderson PowerPole connectors. They universally mate with each other. The only downside is the need for a special crimp tool (on left.) If you want to explore these yourself, I sell wiring kits with them already pre-crimped. | 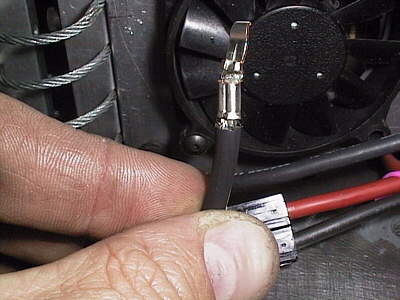 |
 |
A finally I will leave you with a quick rendering that Chris did when I asked him to design a body for the Agrippa. We may try a stainless steel-graphite lamite for the armor, just to be different. Stay tuned. | |