| Home > Robots > Evil Fish Tank! > Part 1 | |
| Part 1 | |
|
Play me online? Well, you know that I'll beat you If I ever meet you I'll control-alt-delete you What? |
 |
EFT was designed to be a high speed rammer so wheel traction was where we started. Tony picked some six inch Colson wheels since they have been the star performer of so many robots. As usual the plastic hub on both faces had to be milled flat to attach our own aluminum one. |
 |
 |
We started with a billet of 6061 aluminum and started turning it on the lathe. I have an entire shelf of aluminum sorted by shape and alloy so we just pulled this one "out of stock." | 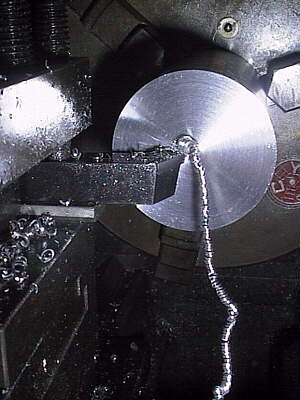 |
 |
After it was turned and bored for the 1/2" axle, we broached a 1/8" keyway into it for that really positive drive feeling that we wanted. |  |
 |
The finished hub! The step on the left provides clearance where it backs up against the outer bearing. When installed in the pillow block and fastened with snap rings, all external forces acting on the wheel (other than rotational) are stopped by the bearings and NOT transmitted to the motor gear reducer. This was implicit in the design from the start. |
 |
 |
The hub bolted into the back of the wheel with some 10-24 screws. A very solid job! |  |
 |
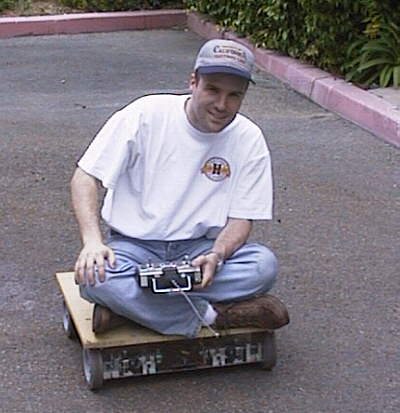
All of our wiring between the nicad towers and our Vantec conroller was made with the 12ga Wet Noodle wire and Anderson PowerPole connectors that I sell. All of our connectors were tightly crimped, as Tony is doing here. The Evil Fish Tank! ready to go on it's first outdoor test drive with a universal scale indicator in the foreground. |
 |
 |
Besides being a prime builder on this project, Tony was also saddled with exhibiting pro driving skills in the arena. Here he is using it to chase Harley riders outside the Team Delta shop. A quick weight test on the 27 lb. robot demonstrates that our cool pillow blocks are definately the hot ticket. |
 |
 |
Tony and I both decided that with the limited time we had a killer ramming robot with sharp spikes was the way to go. So I ordered a bunch of 4130 chromoly tubing and we started laying it out, loosely using Gage's Vlad the Impaler as a mental model. Though I hadn't really worked with this stuff, I'd heard from other builders like Christian and Don Hutson that is a good metal for robot fighting. | |
 |
We went with two different wall thicknesses and two different diameters, all chosen based on the loads at the various points of the frame. The leading edge was milled with a spike, like the needle on a syringe... |
 |
 |
After a lot of geometry and milling I took the parts to a welder up the street. Of couse we had no jig to clamp it all down with so I held the pieces while he tacked them together. Considering that the entire frame was welded up outside by hand and only minimally twisted attests to this guys skill as a welder. | 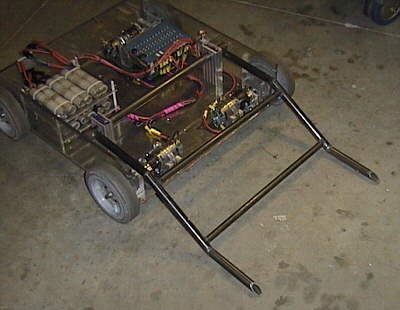 |
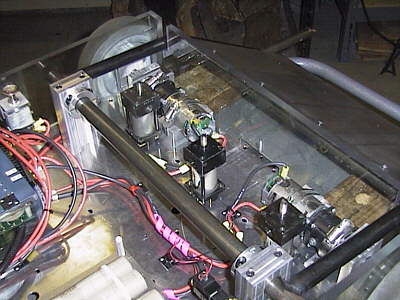 |
We used three pneumatic cylinders to actuate the ramming frame on radio command. And onboard tank of liquid CO2, paintball regulator and industrial shuttle valve ran the show at the command of one of my RCE200 D-switch controllers. | |
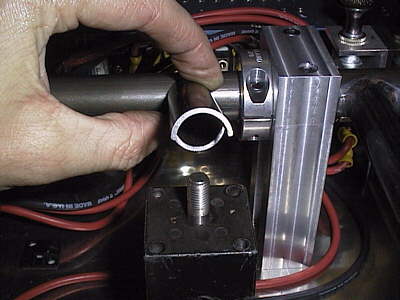 |
From the main axis of rotation, three cup-like extensions were machined to accept the lifting force of the air cylinders. By letting the cylinders press and slip on the inside of the cups I got away without hinging the bottom of the cylinders to account for the changing geometry of the mechanism when they actuated. |  |