So here are a few pictures I snapped in my frantic hurry this past weekend. I may show up at the event with something as functionally unexciting as La Machine, but we will be there!
 | This is my friend Blaine. He is a super machinist. What I really needed was to have him around more six months ago when I was planning everything out. I've had him fix a few things that I couldn't get working, but overall they are minimal. |
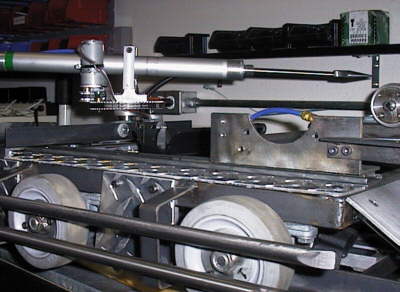
 | This is one of the parts for the pan-tilt rig that runs the pike. I'm really proud of the machining job I did; it's just too bad the things it bolted to didn't come out so well. I should never have embarked on an aluminum mechanism for this much force. It self-destructed the first time I put it under actual load. |
 | The main electronics board with the microcontroller (green) not yet mounted. A great design, at least in my mind. The microcontroller was supposed to decode the R/C receiver signal, reprocess it and run the pan-tilt motors for the pike. RFI and who-knows-what-else from the control lines make the computer behave oddly. It is effectively unusable. (Not that it matters; the mechanism it was to drive is trashed.) |
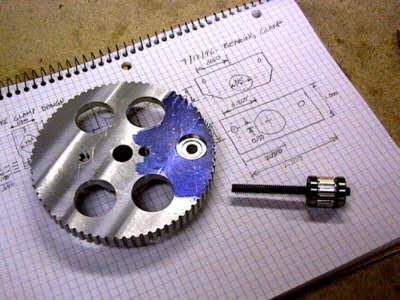
 | This ring gear formed the base of the pike's pan-tilt mechanism. The assembly to the right was a custom linear drive I thought up, complete with $35 bearings from Germany. It worked pretty well, but didn't move the pike fast enough. And it continuously jammed. I have no idea why it doesn't work. |